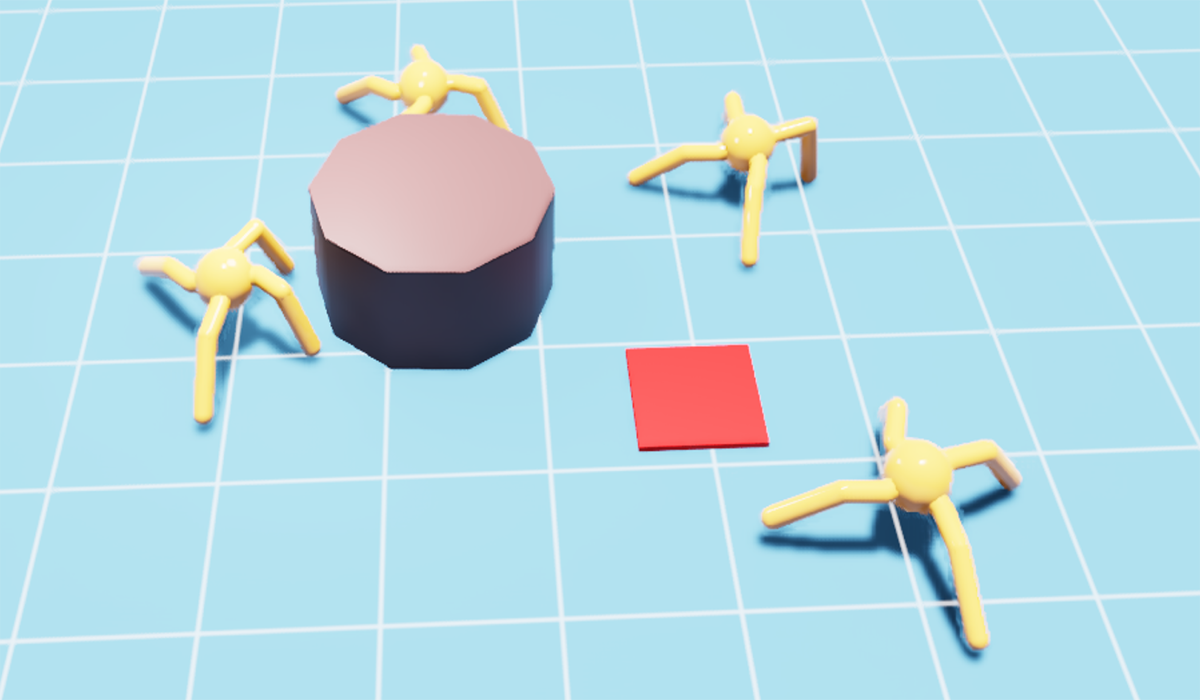
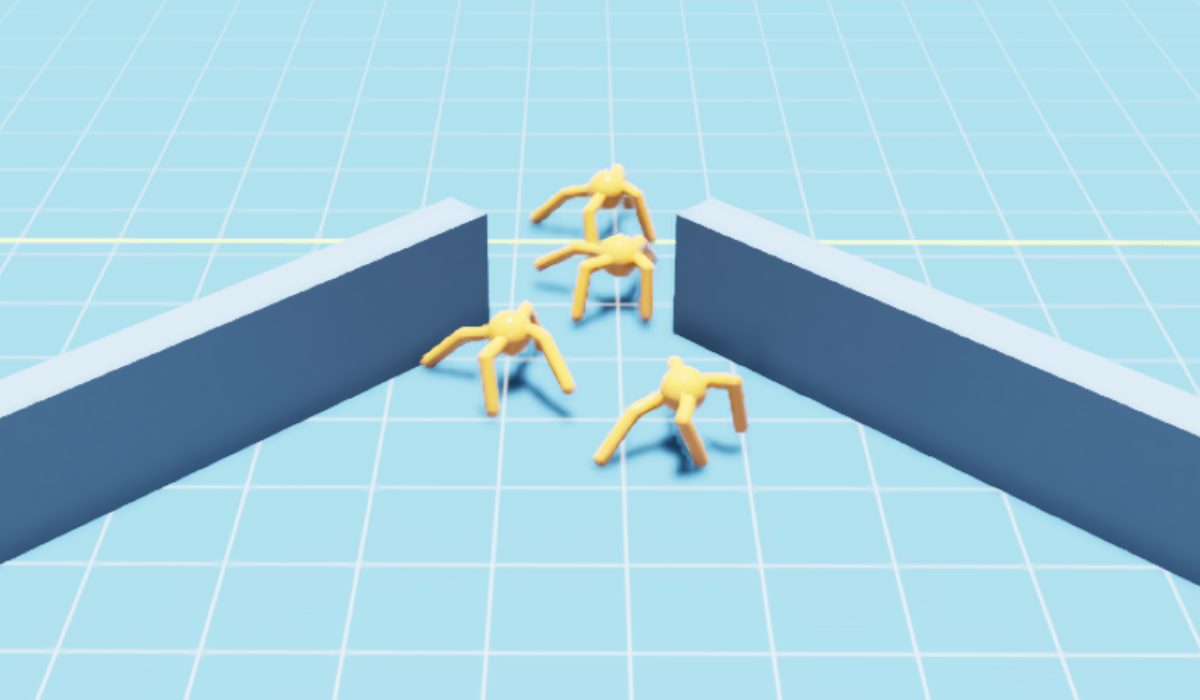
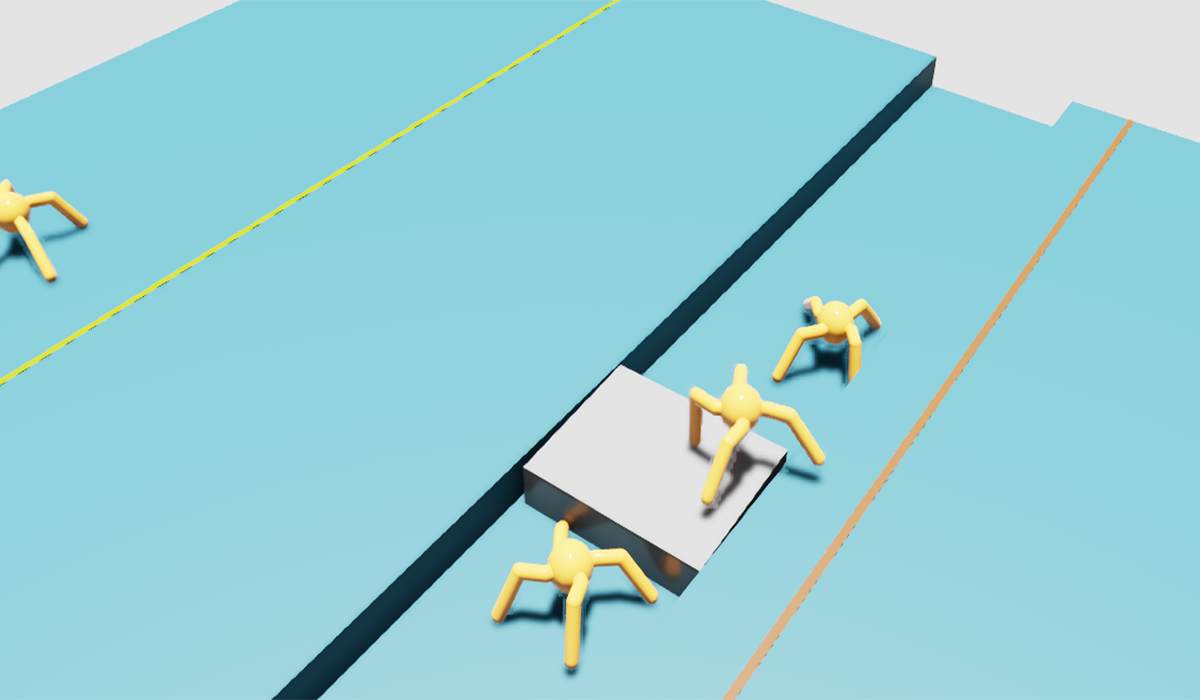
Embodied Cooperation Environments
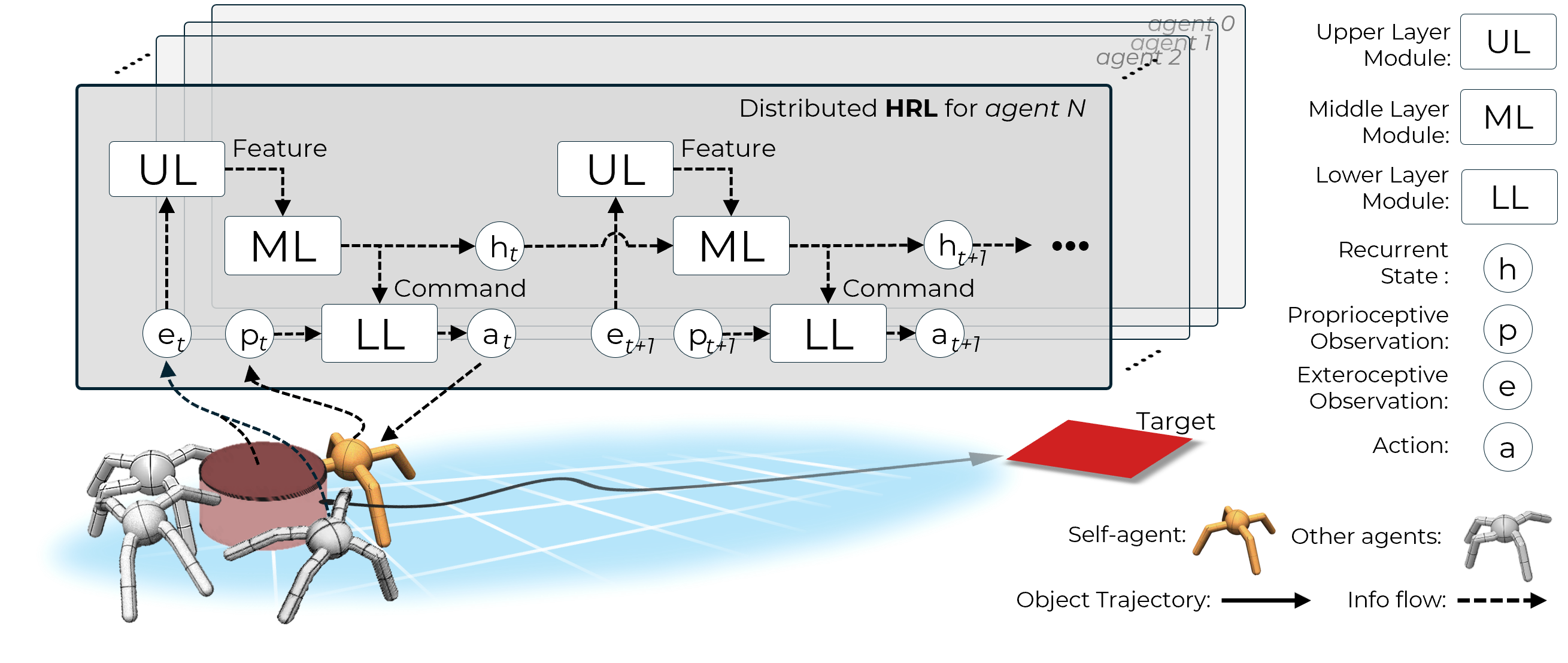
In this work, we propose a distributed hierarchical locomotion control strategy for whole-body cooperation and demonstrate the potential for migration into large numbers of agents. Our method utilizes a hierarchical structure to break down complex tasks into smaller, manageable sub-tasks. By incorporating spatiotemporal continuity features, we establish the sequential logic necessary for causal inference and cooperative behaviour in sequential tasks, thereby facilitating efficient and coordinated control strategies. Through training within this framework, we demonstrate enhanced adaptability and cooperation, leading to superior performance in task completion compared to the original methods. Moreover, we construct a set of environments as the benchmark for embodied cooperation.